
1 Общие сведения
2 Условия эксплуатации
3 Технические характеристики
4 Основная конфигурация
1 Общие сведения
Самоходный модульный транспортер представляет собой специализированное транспортное средство с гидравлической системой подъема и опускания и предназначено для перевозки тяжелых грузов, таких как готовые секции на судостроительной верфи. Транспортер может подъезжать под грузы на опорах, поднимать груз с помощью подъемной системы, перемещать его в любое желаемое место и опускать груз без использования крана или другого подъемного оборудования. Управление может осуществлять один человек. Дизайн включает в себя все последние меры безопасности для эффективной работы.
1.1. Название
SUPRO - Самоходный модульный транспортер
1.2. Количество
Качество основного устройства и аксессуаров представлено в таблице 1 и таблице 2.
1.3. Область работ
Это проект под ключ. В соответствии с требованиями договора заказчик предоставляет качественный продукт. Проект включает в себя проектирование, производство, предварительную отладку установки, предварительное приемо-сдаточное испытание перед отправкой из мастерской, упаковку, доставку, разгрузку, осмотр, отладку установки, тестовый пробег, окончательное приемо-сдаточное испытание и обучение эксплуатации после обслуживания.
4. Содержание проекта
Этот проект состоит из двух комплектов 6-осного самоходного модульного транспортера, включая 2 комплекта Power Pack Unit (PPU), 2 комплекта 6-осного модульного блока без питания. Есть еще один комплект PPU на замену. Общая схема представлена на рисунке 1.
2 Условия эксплуатации
Температура окружающей среды: от -25℃ до 55℃.
Относительная влажность: ≦92%,
Шкала ветра: ≦6
Состояние дороги: Асфальтовое или бетонное покрытие (коэффициент трения 0.018-0.020) или прессованная грунтовая дорога (коэффициент трения 0.025-0.035).
3 Технические характеристики
Конфигурация 6-осного самоходного модульного транспортера представлена на чертеже 1, 1 комплект PPU + 1 комплект 6-осного модульного блока.
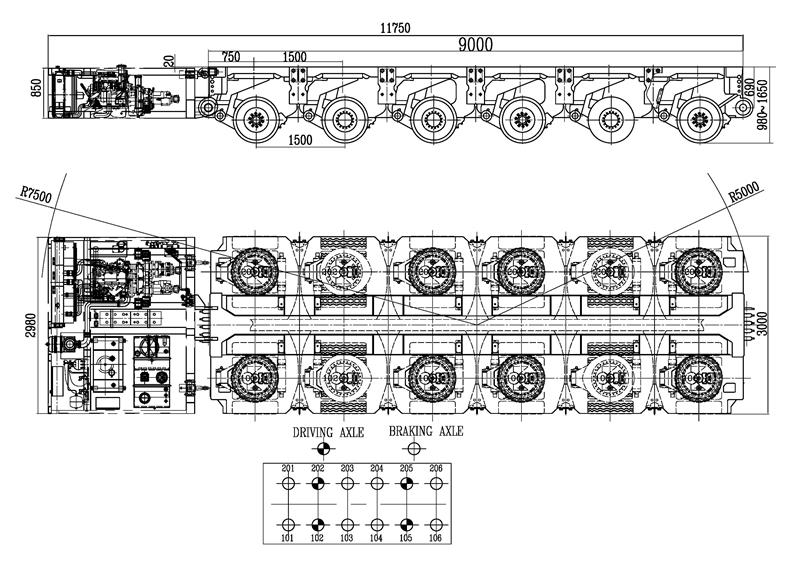
3.1 Общие технические параметры 6-осного модульного блока
Оси---------------------------------------------------------------6
Длина платформы (мм)------------------------------------9000
Ширина платформы (мм)----------------------------------3000
Высота платформы (мм)-----------------------------------980~1650
Максимальная общая масса (кг)--------------------------204,000
Собственный вес (кг)---------------------------------------24,000
Рейтинговый грузоподъемный вес (кг)----------------------180,000
Нагрузка на ось (кг)-----------------------------------------34,000
Нагрузка на подвеску (кг)---------------------------------17,000
Количество ведущих осей------------------------------------2
Кол-во ведущих подвесок-----------------------------------4
Скорость (без нагрузки Км/ч)-------------------------------8
Скорость (при полной загрузке Км/ч)----------------------3
Способность к подъему (%)---------------------------------9
Гидравлическая компенсация (мм)------------------------670
Угол колеса (°)----------------------------------------------±110
Тяговое усилие (кН)-----------------------------------------360
Тормозное усилие (кН)--------------------------------------348
База колес (мм)--------------------------------------------1500
Колея (мм)-------------------------------------------------1800
Радиус поворота (мм)--------------------------------------4847
Кол-во шин--------------------------------------------------48
Спецификация шины---------------------------------------215/75 R17.5
Электрическая система (В)---------------------------------28
Дистанционное управление-------------------------------Радио
Тип подвески----------------------------------------------Гидравлическая, на 3 или 4 точках опоры
Тип рулевого управления---------------------------------Электрическое управление с гидроусилителем, комбинированное многократное рулевое
Тип рамы---------------------------------------------------Структура в форме короба
Тормозная система---------------------------------------Двухтрубная система с диафрагменными пружинными тормозами
диафрагма/пружинный тормоз
3.2 Параметры PPU
L(мм)×W(мм)×H(мм)----------------------2750×2980×850
Угол поднятия (°)------------------------------------------6
Собственный вес (кг)--------------------------------------5000
Производитель двигателя-------------------------------CUMMINS
Тип двигателя----------------------------------------------ISDe 180 30
Мощность двигателя------------------------------------- (кВт/ об/мин) 132/ 2500
Стандарт выхлопных газов------------------------------GB/III
Объем топливного бака (л)------------------------------280
Объем гидравлического масла (л)----------------------600
Макс. рабочее давление в системе привода (бар)------420
Макс. рабочее давление в рулевой системе (бар)-----350
4 Основная конфигурация
4.1 PPU
PPU состоит из двигателя, раздаточной коробки, фильтра, радиатора, интеркулера, масляного радиатора, переменного насоса, топливного бака, гидравлического бака, аккумулятора и т. д. В PPU также установлены гидравлические клапаны для рулевого управления и подъема.
4.2 Рама
Рама является основной частью грузоподъемной части и разработана с учетом наиболее опасных условий загрузки с коэффициентом безопасности 1.3. Основные несущие элементы (такие как балка и плоская пластина) имеют структуру коробчатого балки и сварены из высококачественной пластины (HG785), предел текучести: 685МПа. Съемная крышка установлена на поверхности транспортера.
4.3 Гидравлическая система
Гидравлическая система состоит из системы привода, рулевого управления, подвески. Насос с переменным расходом использует гидравлическую технику, что повышает скорость движения. Для насоса рулевого управления используется контроль постоянного напряжения. При высоком давлении имеется низкий рабочий объем с высокой характеристикой отклика. С независимой гидравлической системой радиатора, насос системы радиатора установлен на двигателе, что обеспечивает надежность радиации при отсутствии рабочего объема, улучшая срок
службы насоса.
4.4 Гидравлическая подвеска
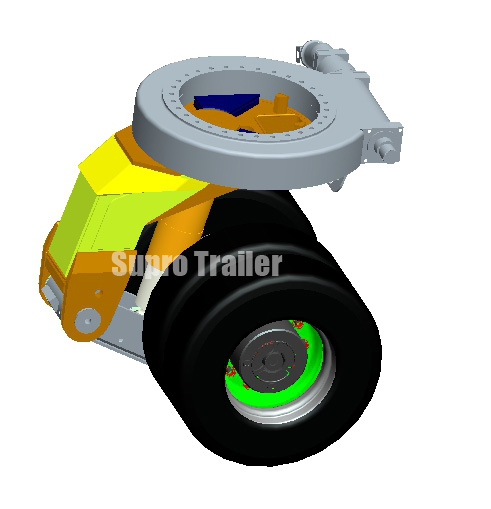
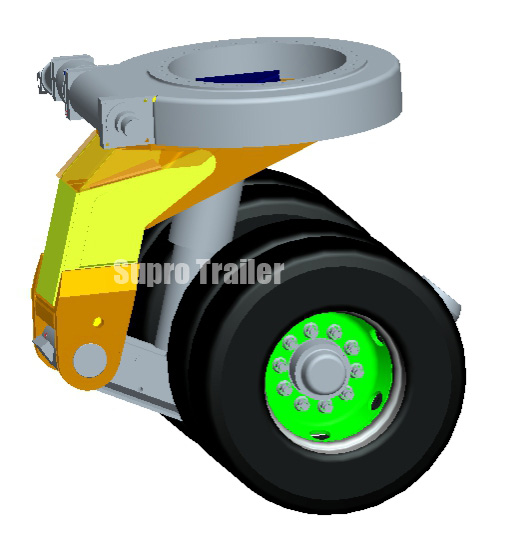
Система подвески - это гидравлическая подвеска, которая сохраняет горизонтальное положение платформы при движении по вогнутой-выпуклой дорожной поверхности. Поддерживающая система использует гидравлическую систему подвески, которая может формировать 4 точки (см. рисунок 2) или 3 точки (см. рисунок 3) опоры.
Оси и рамы соединены через подвеску, и высоту можно регулировать. Гидравлическая подвеска состоит из подвески, маховика, цилиндра подвески, вращающегося устройства и т. д., которое установлено на поперечной балке рамы. Ось колеса расположена сверху на маховике. Подвески и оси колес будут подниматься и качаться, чтобы обеспечивать сбалансированную загрузку всех осей колес.
На четырех углах транспортного средства установлены датчики высоты для каждого транспортера. Электропропорциональный многоклапанный элемент является стандартной конфигурацией для PPU, который может обеспечивать синхронное поднятие одного или нескольких транспортеров.
4.5 Электрическая система многократного рулевого управления
Эта система состоит из насоса рулевого управления, многоклапанного устройства, рулевого мотора, червячного и червячного рулевого управления, датчика угла, контроллера и т. д. (см. рисунок 4)
4.6 Структура рулевого управления
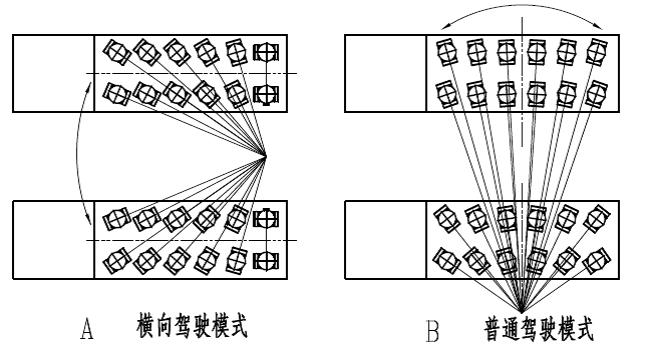
На каждую подвеску установлен один угловой датчик. При движении рукоятки управления, дистанционный контроллер отправляет сигнал рулевого управления, и контроллеры вычисляют теоретический угол каждой подвески в соответствии с заданным режимом руления. Затем контроллер определяет степень открытия клапана путем сравнения обратного сигнала от углового датчика и теоретического значения. В конце концов, гидравлический мотор приводит подвеску к правильному положению.
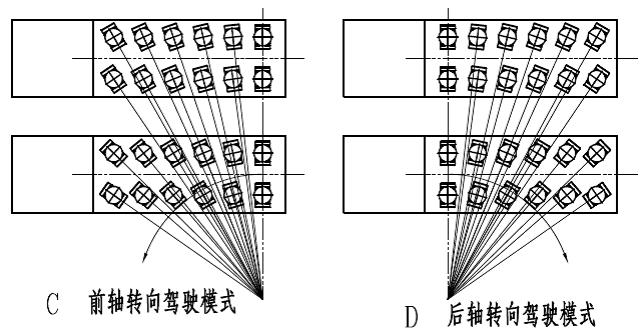
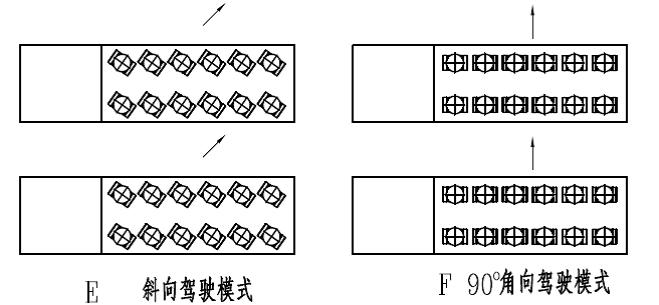
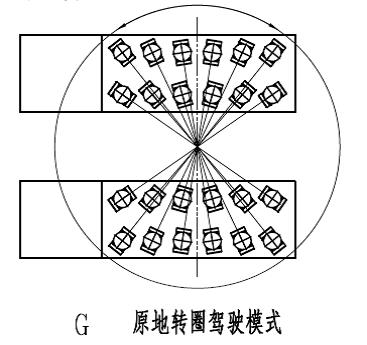
Существует семь режимов рулевого управления: езда "крабом", нормальная езда, управление передней осью, управление задней осью, косая езда, езда под 90° и круговое движение вокруг одной точки. Другие режимы движения могут быть установлены в соответствии с требованиями заказчика. Режимы управления для сцепленных транспортных средств одинаковы (см. рисунок 5 и 6). Если отклонение при рулении превышает 8°, система рулевого управления блокируется, и транспортное средство не может двигаться или издается звуковой сигнал тревоги.
4.7 Видео управления SPMT
4.8 Управление и микроэлектрическая система контроля
При движении рукоятка управления вводит сигналы руления и уровнения, которые являются значениями переключения. Принимая систему микроэлектрического автоматического управления (будет предоставлена контрольная схема), все многорежимные функции могут быть реализованы через контроллер. Микроэлектрическая система управления принимает коммуникацию CAN-шиной, каждый действующий или силовой элемент снабжен одной платой симуляционного управления. Все управляющие и инструментальные сигналы вводятся в основной блок управления через многожильный кабель, после чего обрабатываются центральным компьютером для управления, регулирования и привода соответствующих элементов. Рабочие условия всего транспортного средства могут быть смоделированы на экране в управляющем шкафу и отображены в цифровом формате, что делает его не только наглядным, но и удобным в управлении.
4.9 Антискользящее управление
Так как датчик частоты вращения установлен на каждой ведущей оси, микроэлектрическая система мониторит реальное значение коэффициента сцепления в реальном времени во время движения. Если коэффициент сцепления какого-либо ведущего колеса превышает установленное значение, микроэлектрическая система немедленно отправляет сигнал для уменьшения рабочего объема двигателя этого колеса. Эти действия направлены на обеспечение тяги других ведущих колес, выполнение антискользящего управления и защиту двигателя.
4.10 Тормозная система
Тормозная система адаптирует тормозной башмак и оснащена компрессором. Двойная полость пружинной тормозной воздушной камеры реализует свою функцию через пружинную энергию и мембранную тормозную воздушную камеру. Когда пружинная воздушная камера сдувается ручным управляющим клапаном, пружина может выполнять функцию стояночного тормоза. Если с компрессором что-то не так, пружина может выполнять тормозную функцию самостоятельно. Существует две системы воздушного компрессора. Одна является системой рабочего тормоза, а другая - независимой системой стояночного тормоза. Сервотормоз: при торможении сжатый воздух поступает в диафрагменный цилиндр напрямую из воздушного резервуара для торможения. Стояночный тормоз: стояночное торможение может быть выполнено через силу пружины (даже если трубопровод вышел из строя).
4.11 Электрическая система управления
Номинальное напряжение самоходного модульного транспортера составляет 28 В, с двумя ак
кумуляторами по 180 Ач. Электрические устройства управления и мониторинга PPU используют жидкокристаллический дисплей. Микросистема управления принимает специальные контроллеры Bosch Rexroth для грузовика RC6-9 и его расширенного модуля, чтобы обеспечить его надежность и стабильность. Коммуникации между контроллерами и от контроллеров к дисплеям осуществляются через CAN-шину. В дополнение к обычной функции управления и мониторинга электрическая система управления также имеет следующие функции отображения. Индикация инструмента: скорость, частота вращения двигателя, давление масла, температура масла, температура воды и давление воздуха в тормозной системе; Сигнальные лампы: сигнальная лампа фильтра высокого давления, индикатор управления предварительным нагревом, сигнальная лампа фильтра всасывания и возврата системы привода, сигнальная лампа давления воздуха в тормозах, индикатор зарядки аккумулятора, индикатор стояночного тормоза, индикатор низкого уровня топлива, индикатор давления масла в двигателе, индикатор температуры хладагента, сигнальная лампа уровня гидравлического масла, сигнальная лампа воздушного фильтра. Освещение: поворот, обратный ход, предупреждение, контурный свет, передний свет. Транспортер оборудован управляющим блоком, и все управляющие компоненты установлены в управляющем блоке. Обозначения номера линии (номер клеммы) на транспортном средстве должны соответствовать чертежам, и все виды обозначений должны быть крепкими и надежными. Все компоненты транспортного средства должны быть доступны и соответствовать чертежам. Конфигурация электрической системы управления: специальные контроллеры для инженерного грузовика, ЖК-дисплей, энкодер, датчик давления и главный кабель импортируются, а стандарт безопасности электронного устройства составляет IP65. Обычные электрические компоненты и кабели принимают продукцию первоклассного совместного предприятия и военно-промышленную продукцию. Стандартное выполнение электрических коробок и электрических компонентов составляет IP 55.
4.12 Дистанционное управление
Существуют радиодистанционное управление и аварийное дистанционное управление рулевым управлением. Радиодистанционное управление может выполнять функции ускорения, поднятия, опускания, движения вперед, назад, поворота влево и вправо, зажигания, выгорания, аварийной парковки, установки режима руления, мониторинга информации и т. д. Аварийное дистанционное управление рулевым управлением может выполнять функцию управления каждым колесом независимо. Если отклонение руления превышает 8°, аварийное дистанционное управление рулевым управлением может использоваться для возврата соответствующего колеса в исходное положение.
4.13 Соединение
Каждый модульный транспортер не соединен. Для продольного соединения используется гидравлический соединительный штифт, а для поперечного соединения используется поперечное соединительное устройство. Каждый модуль имеет свою собственную систему управления, которая может выполнять такие функции, как синхронизация самостоятельного руления. Через информацию CAN-шины модули также могут достигать координатной синхронизации. Во время общения один модуль определяется как главное устройство, другие модули получают заказы, такие как руление, движение и торможение, от главного блока.

4.14 Окрашивание
После очистки под высоким давлением поверхность стальной конструкции соответствует классу SA2.5. Толщина слоя и пленки краски должны соответствовать национальному стандарту (более 150 мкм). Для окраски используется краска известного бренда. Большая часть верхнего слоя имеет обозначение R03. Все мелкие детали обработаны гальванизацией.
